 |
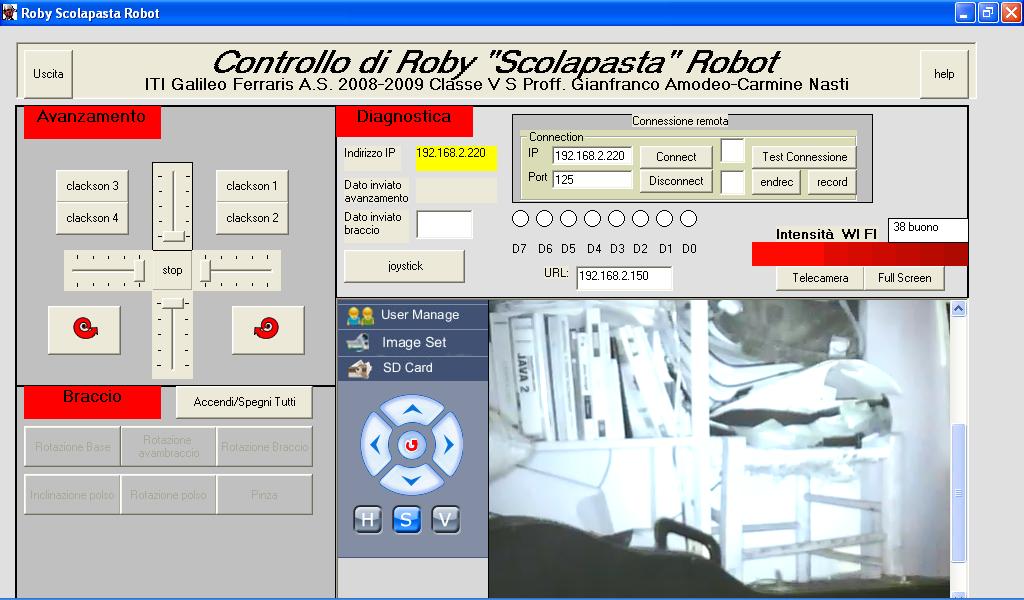
Abbiamo utilizzato come ambiente di sviluppo il Microsoft Visual Basic 6.0. L'applicativo consiste di due parti: una clent installata sul PC che controlla Roby ed una sever che è invece installata su Roby deputata all'esecuzione dei comandi inviati via rete.
|
|
E' previsto l'uso del Joystick per mezzo del quale, se è completo di asse z e POV, controllare tutte le funzioni di ROBY. Frammento di codice relativo alla dichiarazione delle librerie Public Declare Function Inp Lib "inpout32.dll" Alias "Inp32" (ByVal PortAddress As Integer) As Integer |
 |
|
Il Server di Roby |
||
Abbiamo previsto un semplice sistema di allertamento sonoro basato sull'esecuzione di quattro file in formato mp3 o wav oppure, mediante la IP Camera, la possibilità da parte di chi controlla Roby, di usare un microfono che è collegato agli altoparlani installati sul robot. Esso a sua volta è dotato di microfono che invia il suono agli altoparlanti del pc del controllore. Puoi scaricare i sorgenti qui |
||